DJI GO4 概要
DJI GO4 とは、DJI社で提供している公式アプリです。
タブレットやスマホにインストールして通信機に繋ぐことにより、各機体を扱えます。
このアプリは、機体および送信機(プロポ)の各種設定、撮影した映像編集、リアルタイムで飛行中のカメラ映像をモニター越しで確認できるなど、さまざまなサポートをします。(2018年11月執筆)
| DJI GO4 対応機種 | |
|---|---|
| Spark | Mavic Pro Platinum |
| Mavic Pro | Phantom4 Pro Plus V2.0 |
| Phantom4 Pro Plus | Phantom4 Pro |
| Phantom4 Advanced Plus | Phantom4 Advanced |
| Phantom4 | Inspire2 |
| Matrice200 | |
| DJI GO4 推奨端末 | |||||||
|---|---|---|---|---|---|---|---|
| iOS 9.0 以降 | Spark, iPhone5S, iPhone SE iPhone6, iPhone6 Plus, iPhone6S, iPhone6S Plus iPhone7, iPhone7 Plus iPad Air, iPad Air2 iPad mini2, iPad mini3, iPad mini4 |
||||||
| Android OS 4.4.0以降 | Samsung S8 ,Samsung S7 edge, Samsung S7 Samsung S6, Samsung S5, Samsung NOTE4, Samsung NOTE3, Samsung tabs 705c Ascend Mate 9, Ascend Mate 7 Huawei Honor 8, Huawei P8 Max Google Nexus 6p, Google Nexus 7II Vivo X7, Xiaomi 5, Nexus 9, LG V20. |
||||||
DJI GO4 のアプリはこちらからダウンロードできます。


DJI GOとの違い
DJI社から提供されているアプリで「DJI GO」があります。
本ページにて紹介しているものと似ていますが、対応機種の違いがありますので、お間違えのないようご利用ください。
DJI GO4 は、2016年4月以降にリリースされた機種仕様のアプリです。
それ以前の機種にはDJI GO をお使いください。
| DJI GO 対応機種 | |
|---|---|
| Phantom3 Professional | Phontom3 Advanced |
| Phantom3 Standard | Inspire1 Raw |
| Inspire1 pro | Inspire1 |
| Matrice 600 | Matrice100 |
アカウントの登録
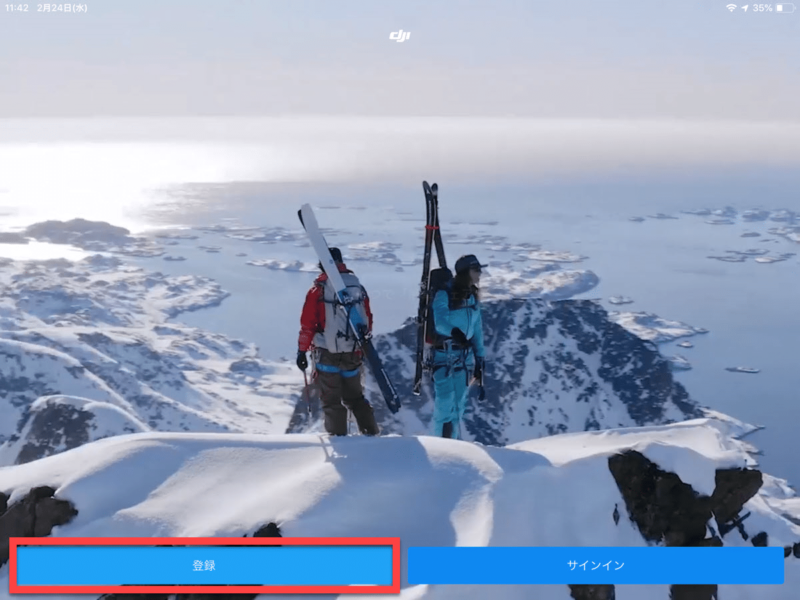
使用する前にアカウント登録を行います。
アプリを起動したら《登録》をタップしてください。
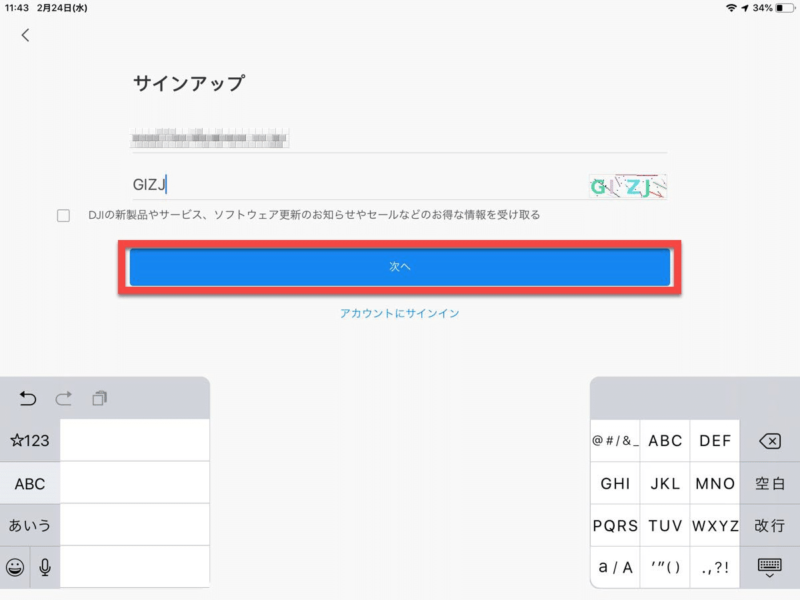
メールアドレス及び認証コードを入力してください。
※認証コードとは、右側に表示されている文字列です。
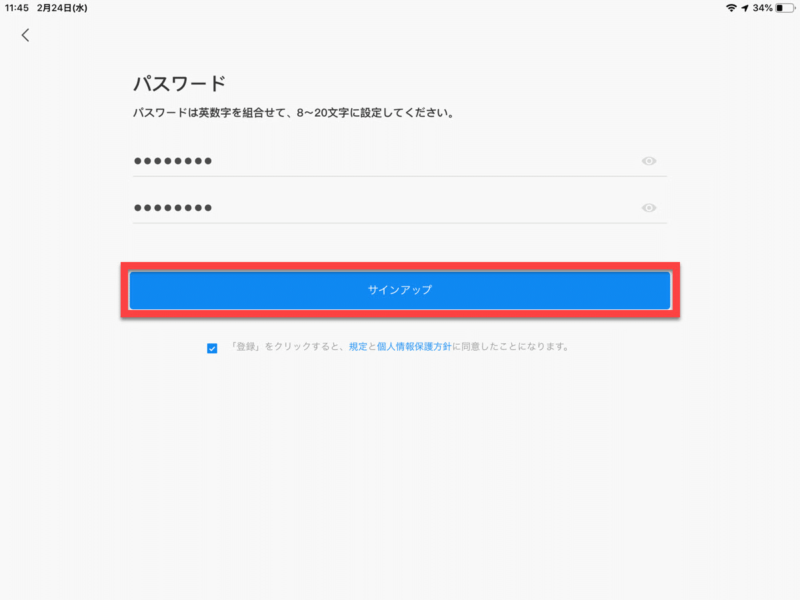
英数字を組み合わせた8~20文字でパスワードを入力してください。
名前、プロフィール画像、性別、国を設定して《OK》をタップすると、登録完了です。
※これらの設定は後で変更できます。

DJI GO4 ステータス画面説明
メイン画面、左上側《飛行モードステータス》をタップすると、機体のステータス一覧が表示されます。
飛行前には異常がないかを必ず確認しましょう。
機体ステータス一覧

| 全体のステータス | 機体やカメラの故障、エラーなどがあるとメッセージが表示さる。※《ノーマル》であることを確認してください。 |
|---|---|
| フライトモード | 《Pモード》《Sモード》《Aモード》の3種類を、送信機左上にある切替スイッチにてモードの変更できる。 |
| コンパス | コンパスが正常かを確認できる。※エラーが表示されている場合は、キャリブレーションを行いましょう。 |
| IMU | 機体の姿勢を制御するセンサーが機能しているかを確認できる。※エラー表示の場合は、IMUキャリブレーションを行いましょう。 |
| ESC ステータス | Electronic Speed Controllers(エレクトロニック スピード コントローラーズ)の略。スティック操作の信号をモーター回転制御へと変換する電子基盤。※エラー表示がでたら飛行を中止してください。 |
| ビジョンセンサー | ビジョンポジショニング機能が作動しているかを確認できる |
| 送信機モード | 送信モードを確認できる。※《モード1》《モード2》《モード3》《カスタム》の4種類から、自分が使用しているモードになっているかを確認しましょう。 |
| 送信機バッテリー | 送信機のバッテリー残量を確認できる |
| 無線チャンネル品質 | 電波および電磁波からの干渉を確認できる。※強い電波干渉があるときなどは、長距離飛行に注意を促す警告が表示されます。 |
| ボタンのカスタマイズ | 送信機の裏面にあるボタン(C1:左手側、C2:右手側)の設定ができる
など、さまざまな設定が行える |
| 機体バッテリー | 機体に装着したバッテリーの残量が確認できる |
| 機体バッテリーの温度 | バッテリーが適温か確認できる |
| ジンバルステータス | ジンバルカメラの状態を確認できる |
| SDカード残り容量 | SDカードの残り容量を確認できる。※フォーマットすることも可能です。また、SDカードが入っていなくても飛行に問題はありません。 |
DJI GO4 各機能の設定画面
右上部のアイコンをタップすると、各機能の設定画面が表示されます。
ここで機体や送信機、バッテリーなどの詳細情報の確認および設定を行えます。
MCパラメータ設定
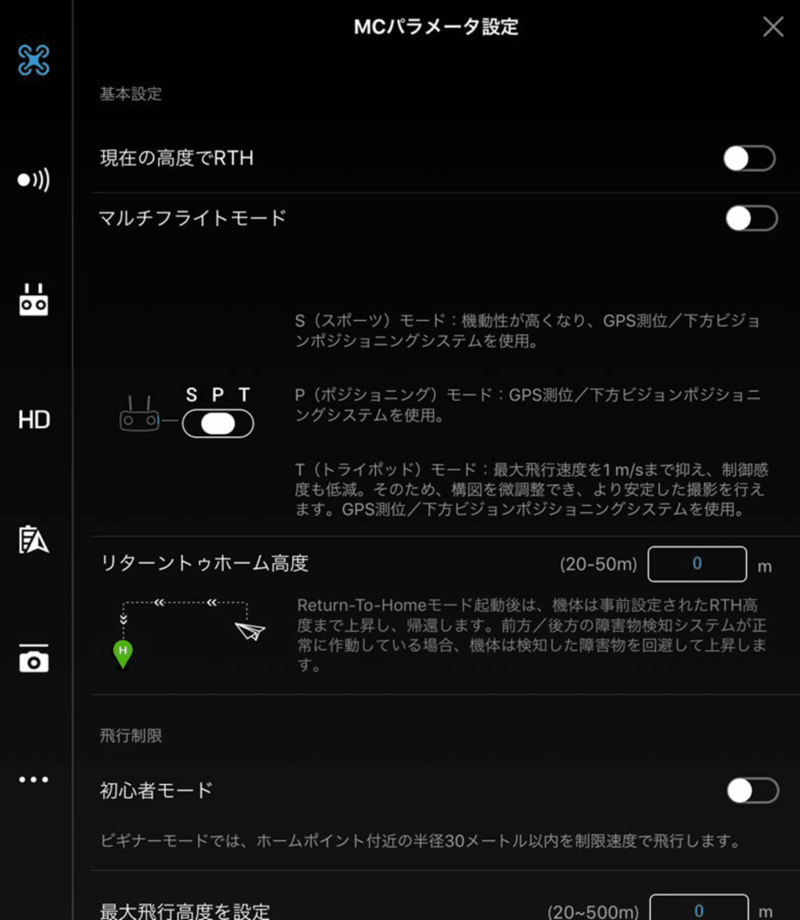
| マルチフライトモード | オンにすることで、送信機のフライトモードの切替スイッチを使うことができる |
|---|---|
| リターントゥホーム高度 | 機体を自動帰還させる時の飛行高度を設定できる。※リターントゥホームを作動させると、設定された高度まで上昇したのち、ホームポイントに下降します。 |
| 初心者モード | オンにすることにより、最大高度30m、最大飛行距離30mの範囲内で飛行させる。※フライトモードもPモードのみしか選択できません。 |
| 最大飛行高度を設定 | 最大飛行高度を設定する。※1 |
| 最大距離を有効化 | 最大飛行距離を設定する。※1 |
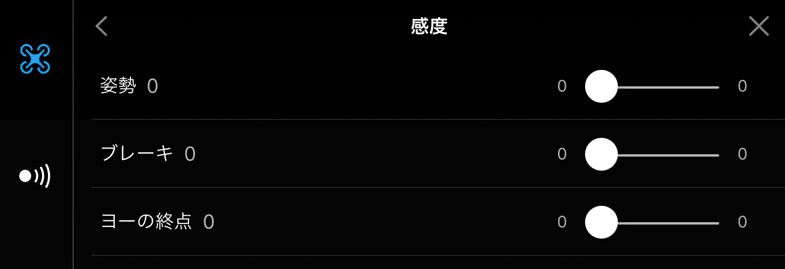
| 詳細設定 | 経験値 送信機のスティック感度を調節する。 係数が高ければ高感度、低ければ感度は鈍くなる。 感度 姿勢:機体を水平に戻す速さ調整 ブレーキ:ブレーキの速さ調整 ヨーの終点:ラダーの速さ調整ゲイン 各動きの調整を行う。 ピッチ:前後 ロール:左右 ヨー:旋回、垂直:上下 センサー IMUおよびコンパスのキャリブレーションの必要性について確認できる。 フェイルセーフ 送信機とのリンクが切れた際に次の3つから機体の動きを選択できる《リターントゥホーム》《着陸》《ホバリング》。 フロントLEDをオン オンにすることで、フロントのLEDを赤く点灯させる。 |
※1 ジオフェンス機能(仮想地理的境界線)と呼ばれ、飛行距離を制限させることができます。この機能は、初心者モードがオンの状態では設定できません。
MCパラメータ > 詳細設定画面について
送信機のスティック感度の調節

機体の感度調節
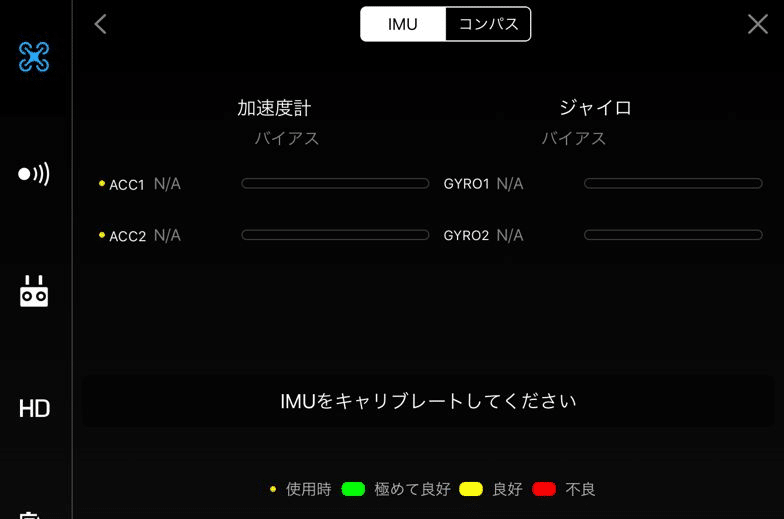
MU及びコンパス
その他詳細設定
ビジュアルナビゲーション設定
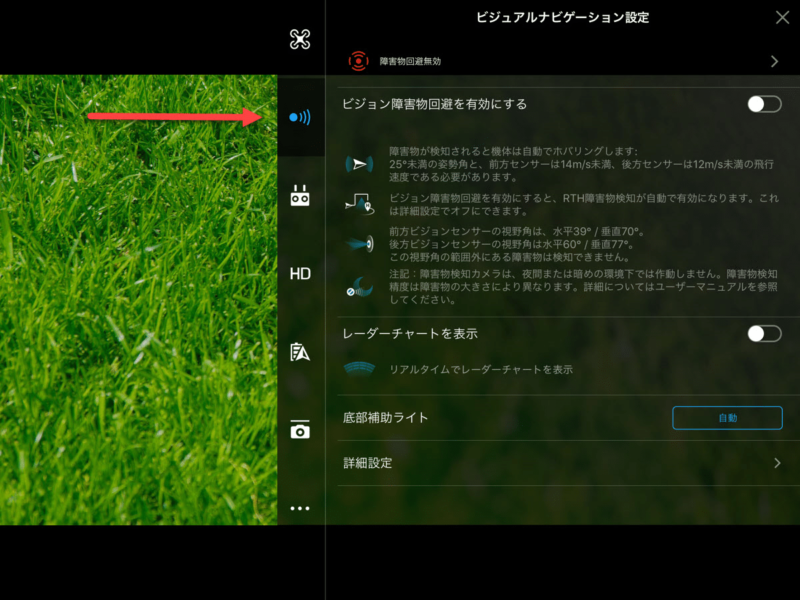
| ビジョン障害物回避を有効にする | 有効にすると、以下の3つが作動する。
注記:障害物検知カメラは、夜間または暗めの環境下では作動しません。障害物検知制度は障害物の大きさにより異なります。 |
|---|---|
| レーダーチャートを表示 | リアルタイムでレーダーチャートを表示させる |
| 詳細設定 | ピジョンポジションを使用 オンにすることで、下方ビジョンポジショニング機能が作動。 GPS信号が無くても安定したホバリングが可能。 PTH障害物チェック オンにすることで、周辺光が不十分な場合、自動で上昇をして障害物を回避させる。 |
送信機設定
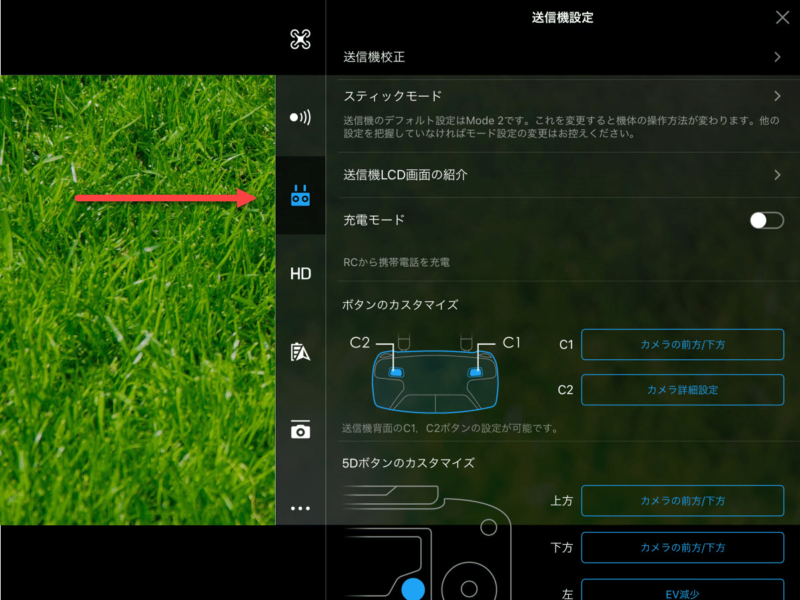
| 送信機校正 | 送信機のスティックのキャリブレーションを行う |
|---|---|
| スティックモード | 《モード1》《モード2》《モード3》+《カスタム》から選択できる。《カスタム》は自由に設定が可能 |
機体と送信機が繋がらない場合
機体と送信機が繋がらない状態になることもあります。そういった場合は下記の手順に沿ってリンクさせましょう。
- アプリ内《送信機設定 > 送信機リンク》をタップする
- 送信機に接続しますかと表示されたら《OK》をタップする
- ペアリング状態となる
- 機体の側面にある赤で点滅している《リンクボタン》を突起物で押す
- 画面上に、送信機とのリンク完了と表示されたら《OK》をタップする
機体と送信機のリンク方法
映像転送設定
| チャネル | 《自動》《カスタム》の選択ができる。※電波状況が悪い場合は、赤線表示が多くあり不安定だということが分かります。 |
|---|---|
| ノイズ | 周囲の電波状況をグラフ表示。※赤線が多くあると電波干渉が強いので映像品質の低下や遅延が生じる恐れがあります。 |
| アプリとHDMIに同時出力 | オンにすることで、HDMIモジュールの装着時に同時出力される |
| HDMI OSD 出力表示 | オン:アプリ情報もHDMI先のモニターに表示される オフ:カメラ映像データのみHDMI先のモニターに表示される |
| HDMI単位 | OSD に表示される数値単位を《メートル》か《フィート》で切替する |
| FPS | フレームレートを《50hz》か《60hz》に切替する |
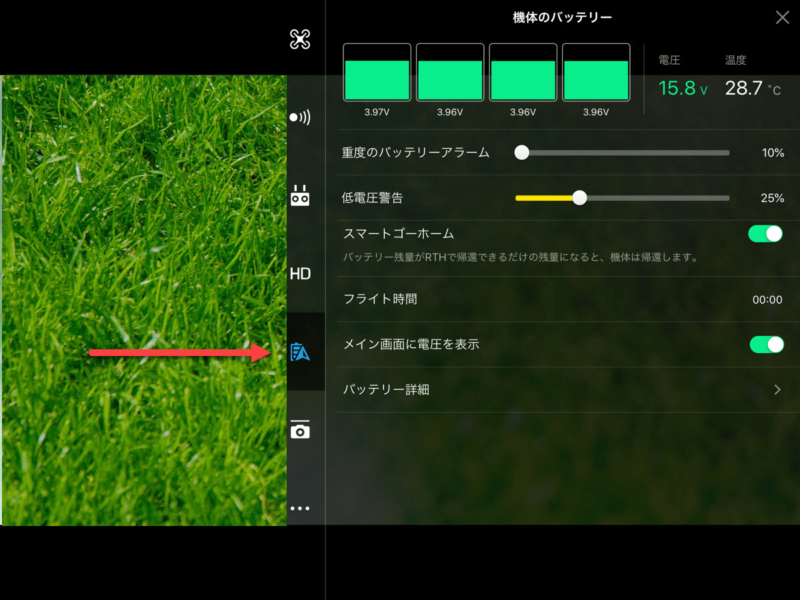
機体のバッテリー
Phantom をはじめとするドローンは、バッテリー残量はとても重要事項です。
送信機とともにバッテリー残量はきちんと確認してから飛行させましょう。
例えば Phantom4 には、バッテリーセルが4本装備されています。
各セルの電圧が均等であるかも確認することが大切です。
| 重度のバッテリーアラーム | ホームポイントに戻るためのバッテリー残量を設定できる |
|---|---|
| 低電圧警告 | バッテリー残量が低くなり、低電圧になる残量を設定できる※警告音が鳴ったら速やかに帰還させましょう。 |
| スマートゴーホーム | オンにすることによりホームポイントへ戻ることすら不可能になる前に自動的に帰還する※不安な方はこの機能をオンにしておくことを推奨します。 |
| フライト時間 | フライト時間が表示される |
| 自己放電 | バッテリーが機体装着時で放置している場合に行われる自己放電の期間を設定する |
| メイン画面に電圧を表示 | オンにすることで、アプリメイン画面にバッテリーの電圧が表示される |
| バッテリー詳細 | バッテリーの詳細が表示される |
ジンバルパラメータ設定
カメラワークの決め手となるのが、ジンバルのパラメータ設定です。
この設定を細かく調節することにより、クオリティ高い映像に仕上げることができます。
設定は3つまで保存しておくことができるので、状況に応じて設定の切替を行いましょう。
| ジンバルモード | 《フォローアップモード》《FPVモード》の選択ができる。
フォローアップモード
機体の傾きに影響されずカメラは水平を保つ。 FPVモード
機体の傾きに合わせてカメラも傾く。 |
|---|---|
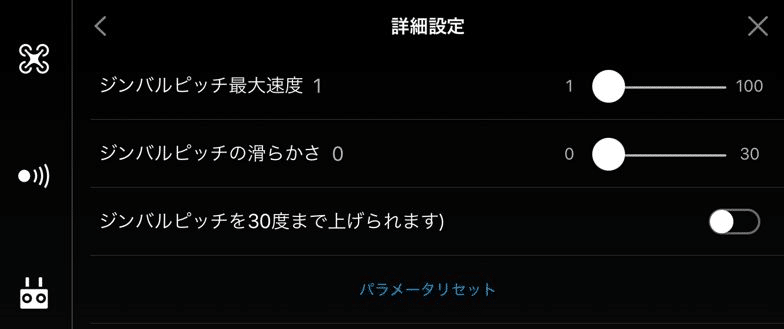
| 詳細設定 |
ジンバルピッチ速度
カメラ向きを上下速度を変更できる。 ジンバルピッチを30度まで上げられます
オンにすると30度まで上に向けることが可能。 ジンバルピッチの滑らかさ
ジンバルピッチの惰性調整。 数値が小さいとパッと止まり、大きいほど滑らかに動く。 ジンバルヨー・シンクロ・フォロー
ジンバルが左右に動かない機体でヨー回転させた時に動きを吸収して予備動作を入れる。通常はオンを推奨する。 |
一般設定
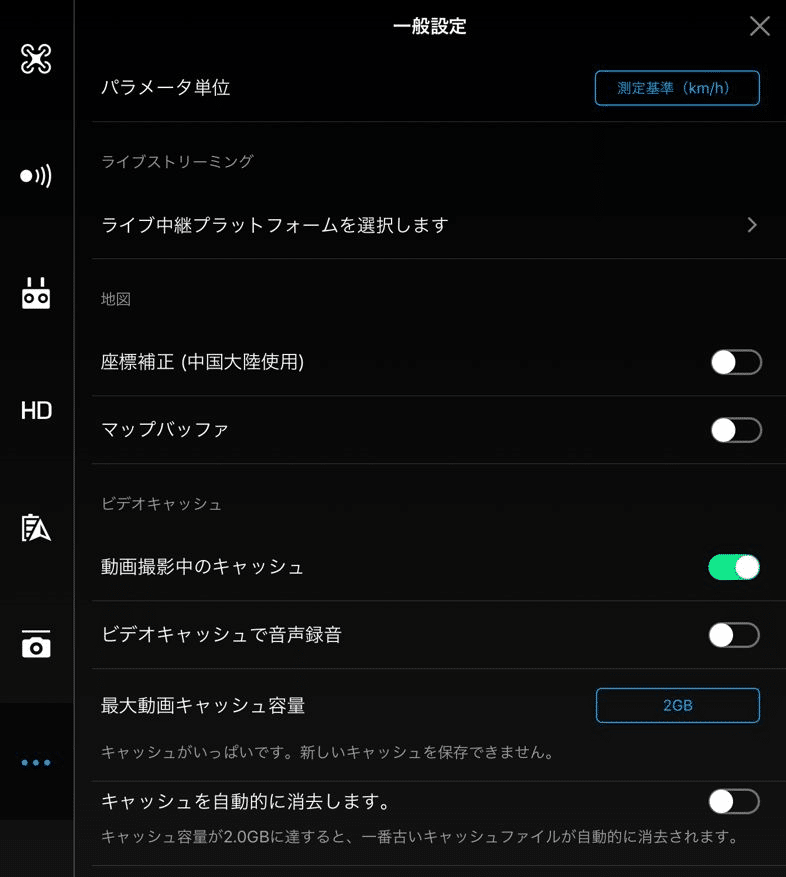
| パラメータ単位 | 速度表示を《測定基準(㎞/h)》《測定基準(m/s)》《Inperial(mph)》から選択できる |
|---|---|
| ライブ中継プラットフォームを選択します | SNSサイトと連携させてリアルタイムで配信できる |
| 飛行経路表示 | 飛行経路をマップ上に表示させる |
| 座標補正(中国大陸使用) | 日本国内では使用しない |
| マップバッファ | アプリ内にキャッシュしておくことでマップ時間の短縮を図る |
| 動画撮影中のキャッシュ | アプリ内に動画を残さず、アプリ上で撮影した動画を編集、再生できる |
| ビデオキャッシュで音声録音 | 飛行中の撮影時、手元にあるタブレットで音声を録音できる |
| 最大動画キャッシュ容量 | キャッシュ容量を《2GB》《4GB》《8GB》《16GB》《自動》から選択できる。※キャッシュがいっぱいになると自動的に停止します。 |
| キャッシュを自動的に消去します。 | アプリ内の動画キャッシュを消去させる |
| 警告 | いつ、どのような警告があったかを確認できる |
| フルスクリーン | フルスクリーンにする方法を設定できる |
| 説明 | アプリのバージョンや送信機のシリアルナンバーなどを確認できる |
DJI GO4 設定しておくべきポイント
飛行中のトラブルを防ぐためにも、事前にきちんと接続されているかを確認作業を行いましょう。
機体、送信機、ジンバルカメラなどに問題がないか?
プロペラやバッテリーが機体にきちんと装着されているか確認しましょう。
装着不十分な場合は、落下する恐れが生じます。
またプロペラに破損があった場合も同様です。
送信機とタブレットを繋ぐ配線も忘れがちですのでご注意ください。
モード設定は3種類 + カスタムの設定があります。
自分の使う設定になっているかを確認しましょう。
猛暑または冬場の寒冷地など、極端に温度変化のある状態で飛行させる時には、バッテリーの状態を把握しておきましょう。
バッテリーの温度が低すぎていないか?
満充電になっているか?
さまざまな要因からバッテリーの寿命も変動されますので、常に状態を把握しておきましょう。
機体が正しくコンパスを認識するために、直接機体を回転させて調節することをコンパスのキャリブレーションといい、飛行前や場所移動した際などに行います。
コンパスがずれている状態で飛行すると、鉄塔やアンテナなど強い干渉がある場所では特に不安定に陥ることもあり、墜落するという事態も否めません。
毎回行う必要はありませんが、エラーが出ている時や1度キャリブレーションをした場所から遠くはなれたときなどに行いましょう。
- 《ステータス一覧 > コンパス 校正》をタップする
- 機体のステータスインジケーターが黄色に点灯する
- 機体を水平に持ち、360度回転する
- ステータスインジケーターが緑色に点灯する
- 機体正面を下に向けて、360度回転する
5. 緊急時を想定した設定について
飛行中に機体と送信機の接続が切れてしまう場合もあります。
そのような緊急時を想定して、リターントゥホーム(RTH)機能を設定をしておくと安心です。
このRTH機能は3種類あるので覚えておきましょう。
また、そのために高度の設定をしておくことも大切です。
アプリ内の《MCパラメーター設置 > リターントゥホーム高度》で設定できます。
| スマートRTH | 送信機の正面右のボタンを押すか、モニター上のリターントゥホームボタンをタップすると起動。※GPS機能が作動していれば、自動的にホームポイントに帰還します。 |
|---|---|
| ローバッテリーRTH | 飛行中に機体のバッテリーが影響を及ぼす可能性がある量まで低下すると起動。モニター上には警告表示されます。警告されてから10秒以上操作せずにいると、機体は自動帰還します。もし帰還できないと判断された場合は、その場で自動着陸します。 |
| フェイルセーフRTH | 障害物に電波が遮断され3秒以上経過したときに作動。送信機からは制御が行えないため、障害物検知機能や高度設定が重要となります。 |
送信機や機体の色や点滅について
送信機や機体には、LEDが搭載されています。
《R=赤》《G=緑》《Y=黄》の3種類の点灯および点滅で、機体のコンディションを知らせてくれます。
致命的な警告などもLED表示されることもありますので、覚えておきましょう。
機体のLED表示
機体には、各プロペラ部分の下部に4つのLEDが搭載されています。
機体前面にある2つが《フロントLED》。
そして交尾にある2つのLEDが《機体ステータスインジケーター》です。
機体のさまざまな情報を視覚的効果で知らせてくれる機能です。
| フロントLED | ||
|---|---|---|
| R | 赤の点灯 | 電源オンの状態 |
機体前面にある2つのフロントLEDは、電源が入ると常に点灯した状態になります。
また、機体の方向を示す役割もあるので、目視確認の情報にもなります。
| 機体ステータスインジケーターLED(平常) | ||
|---|---|---|
| RGY | 3色が交互に点滅 | 電源オン及びセルフチェック |
| G | 緑がゆっくり点滅 | 安全に飛行できる※1 |
| G | 緑が2回ずつ点滅 | 安全に飛行できる※2 |
| Y | 黄がゆっくり点滅 | 安全に飛行できる※3 |
※1 GPSが有効なPモードまたはSモード
※2 GPS及びピジョンポジショニングが有効なPモードまたはSモード
※3 GPS及びピジョンポジショニングが無効なAモード
| 機体ステータスインジケーターLED(警告) | ||
|---|---|---|
| Y | 黄が素早く点滅 | 送信機の信号ロスト |
| R | 赤がゆっくり点滅 | バッテリー低下警告 |
| R | 赤が素早く点滅 | 致命的なバッテリー低下警告 |
| R | 赤が交互に点滅 | IMUエラー |
| R | 赤が点灯 | 致命的なエラー |
| R+Y | 赤、黄が交互に点滅 | コンパスキャリブレーションが必要 |
DJI GO4 まとめ
DJI GO4 は、Phantom4をはじめとするドローンを飛行させる時に必要なアプリです。
機体設定をはじめとして、飛行ログの確認、ユーザーサポートも行えます。
アプリの機能や基本的な使い方を覚えて、ドローンを飛行させるときは必ず、DJI GO4 にて確認を行いましょう。
お問合せはこちら
国家ライセンス制度、補助金、講習内容など、ご不明点はいつでもご連絡ください。講習日に見学も受け付けておりますのでお気軽にお問い合わせください。


〒981-3203
宮城県仙台市泉区高森4-2-342
電話:022-739-8861
Mail:info@xd-fun.com